
LOSI Rally Car upgrade - střídavý motor
Jak jsem psal v minulém článku, Honza mi vylepšil Losnu montáží LiPO dvoučlánku. Výkon a rychlost stoupla dramaticky, ale s tím bohužel i ztrátový výkon motoru. Ten je na hranici únosnosti. Dá se pár minut jezdit, ale pak je třeba docela dlouho chladit.
To mě přesvědčilo, že by bylo dobré upgradovat na brushless motor. Menší ztráty, větší výkon - jednoduchá rovnice. Stačí připočítat rozumných 40E za combo motor + ESC a řešení je jasné. Dále jsem přemýšlel jestli mám přiobjednat také programovací kartu pro ESC, ale nakonec jsem ji nevzal. Dobře jsem udělal, protože byla součástí upgradu (www.cogius.de), nalepená zezadu na návodu. Na stránkách eshopů se to ale málokde dozvíte.

Tím ale výdaje bohužel nekončí, je potřeba další upgrade combo - příjmač + servo. Servo nepotřebuji, mám dostatečné zásoby, a platit 25E za kompletní set, ze kterého použiji pouze samostatný přijmač je zbytečně mnoho.
Někomu by se mohlo zdát, že si chci nechat vrtat koleno pro pár korun. Proč nejít rovnou do 2.4GHz? To by vše vyřešilo. Auta mám ale stále jako pokusného koníčka, a tak se mi nechce příliš investovat. Navíc AM souprava pracuje bez problémů. Hledal jsem tedy přístup, jak použít co nejvíce stávajících komponent, a nic funkčního zbytečně nevyhazovat.
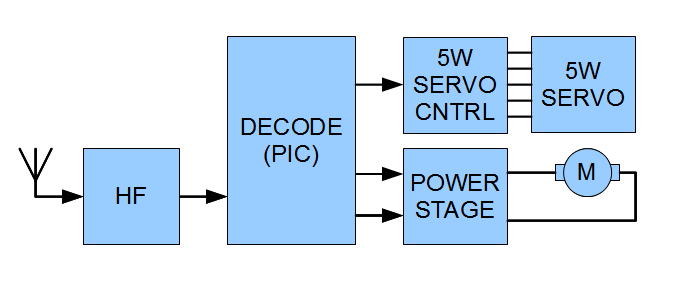
Vyšel jsem z předpokladu, že příjmač někde musí mít lehce rozkódovatelný signál. Ideálně rovnou dva serovokanály, ale to bych chtěl moc. Na P-ESC (přijímač + brushed ESC) jde signál z HF (High Frequency) části do procesoru (PIC), ktrý jej dekóduje a přímo řídí výkonové tranzistory motoru. Co se týče serva, tam také probíhá speciální řízení. Servo je 5ti drátové a procesor si sám vyhodnocuje jeho polohu. Žádné servo signály nikde bohužel nejsou. Na obrázku je blokové schéma LOSI P-ESC.

Signál je nejprve demodulován v HF bloku a posléze zpracován mikroprocesorem PIC. Ten již, pomocí podpůrných obvodů, řídí motor a servo.
Dospěl jsem k názoru, že si budu muset vyrobit vlastní dekodér pro signál z HF části. Pokud nepoužívá LOSI žádný zvláštní protokol, mělo by být možné jej rozkódovat pomocí obyčejného mikroprocesoru. Multimetrem jsem změřil frekvenci na nožičkách procesoru a našel vstup z HF části. Frekvence vycházela 150Hz, což je násobek 50Hz standartní servo frekvence. To je dobrý začátek.
Jako dekodér jsem použil mikroprocesor ze šuplíkových zásob - ATTiny12 (http://www.atmel.com/dyn/resources/prod_documents/doc1006.pdf) v SMD verzi. Sice již není doporučován jako zastaralý, tuto práci ale hravě zvládne. Stejně jako by to dokázal kterýkoli z jeho mladších bratříčků. Ideálním řešením je samozřejmě přeprogramování samotného PIC na PCB, ale bohužel nemám na tento typ programátor.
Návrh prototypu byl velmi jednoduchý. V podstatě se jedná jen o mikroprocesor, na jehož vstup je připojen signál z LOSI přijímače a výstupy vedou přímo na serva. K tomu jen minimum součástek pro zajištění stabilního napájení procesoru a správné hodnoty na resetu. Blokové schéma s odhadnutými průběhy signálů je vidět na následujícím obrázku.

Originální P-ESC zůstane beze změn a může tak být v budoucnosti ještě použit. Stejně tak není zatím důvod zbavovat se 5tidrátového serva. Schéma bloku DECODE (ATTiny12) není komplikované.

Napájení jde přímo z BEC, pouze trochu odfiltrované kondenzátory. Signál z HF části se jmenuje PWM_IN, výstupní signály pro serva jsou PWM_OUT1 resp 2.
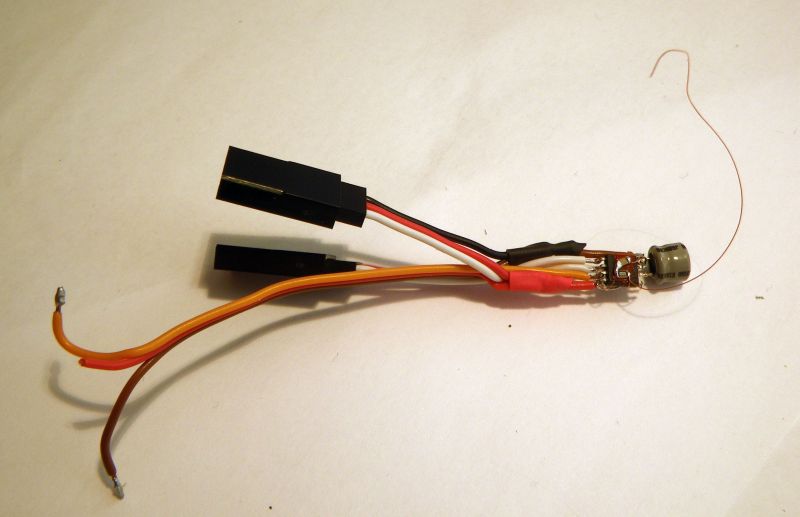
Pustil jsem se do prototypu, trochu hodinářská práce. Pájení 0.1mm drátů na nožičky ATTiny bylo sice náročné, ale nakonec se povedlo jak můžete vidět zde.

Mikroprocesor s podpůrným baťůžkem. Odpor na obrázku je špatně, ale i tak to funguje. Měl být cca 1kOhm, ale omylem jsem použil 100 Ohm.
Kromě vstupního signálu a napájení jsem prozatím všechno propojil pouze tenými drátky – chtěl jsem vědět pouze to, zda je můj projekt proveditelný. Větší filtrační kondenzátor jsem také prozatím nepoužil.
Kvůli programování bylo nutné oprášit asembler. ATTiny12 je low-end řada, nemá žádnou RAM a C kompilátor ji proto nepodporuje. Překvapilo mě jak to šlo rychle, za hodinku jsem už měl první examplář. Procesor se programátoru přihlásil na první pokus a i první verze programu měla náznak funkčnosti. Po chvíli ladění jsem se odvážil připojit servo a e´voila, moje třídrátové servo krásně kopírovalo servo z LOSI. Rozběhnout druhý kanál - plyn už byla dělnická práce.
ASM : http://www.rcbalancer.net/sites/default/files/losi_hijack.asm
HEX : http://www.rcbalancer.net/sites/default/files/losi_hijack_attiny12.hex
To je vše k funkčnímu prototypu. Pro nasazení v terénu bylo nutné vše propojit robustněji, napájet konektory, atd…

Finální výrobek je vidět zde. Dále jsem jej zalil do akrylátu a přemsrštil. Nyní je myslím připraven na skutečný test ve vozidle.

Záměrně jsem vyvedl ven navíc drát resetu, který sice pro normální funkci není třeba, ale používá se při programování procesoru. Všechny zbývající potřebné programovací piny jsou zároveň na servokonektorech (MISO, MOSI, SCK).
Následuje montáž do LOSI. Mechanickou částí se moc zabývat nebudu, existuje jistě mnoho možností. Co se týče elektrické montáže, tak jsem nejprve odpájel všechny dráty z LOSI P-ESC, včetně vypínače. Kladný pól napájení a PWM_IN signál jsem připojil ze spodní strany (bottom). Záporný pól pak ze strany horní (top).


Nový regulátor a svůj modul jsem umístil tam, co bývala původní baterie. 2S LiPOL se tam stejně nevejde a je umístěna nahoře pod kapotou. Jediná mechanická úprava byla nutná pro průchod napájení od baterky k regulátoru.
Motory už jsem měl vyměněné, na obrázku je porovnáni základního a brushless.

Oba jsou stejně malé, ale rozdíl ve výkonu je obrovský.
První testy dopadly naprosto strašlivě. Dosah vysílačky nejvýše 2 metry! Moje nálada byla na nule, tohle jsem rozhodně nečekal. Takže už asi podesáte, rozborka sborka Losny - zde byla také příčina problémů. Při neustálé manipulaci s elektronikou jsem ukvrdlal anténu. Po pořádném připájení šlapalo všechno jak má. Přesto mám pocit že konverze měla trochu negativní dopad na dosah … nebo je to tím že je rychleší?
Pekelně rychlejší! Upgradovaná Losna jede jako drak, akceleraci má skvělou. Musím se dost krotit, jinak jsem pořád na střeše - pozice baterie zvyšuje těžiště, takže má Losna tendenci se v prudkých zatáčkách překotit. V blízké budoucnosti si koupím menší LiPOL a dám jí tam kam patří, lehkou elektroniku zase naopak nahoru pod kapotu – to by mělo pomoci.
Celková cena upgradu byla asi 40E za ESC combo a 2E za součástky. Navíc mě hřeje dobrý pocit, že nemusím nic vyhazovat.
kojak(at)rcbalancer.net
| Příloha | Velikost |
|---|---|
| 152.18 KB | |
| 123.51 KB | |
| 119.51 KB | |
| 11.25 KB | |
| 25.14 KB | |
| 4.11 KB | |
| 91.37 KB | |
| 92.56 KB | |
| 99.41 KB | |
| 90.96 KB | |
| 102.48 KB | |
| 1.3 KB | |
| 255 bajtů |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Komentáře
rony
28 Březen 2011 - 3:22pm
Trvalý odkaz
kategorie
opravil jsm ti kategorie je to comma separated seznam
honza
28 Březen 2011 - 10:49pm
Trvalý odkaz
konverze
Pěknej návod; sice k provedení je asi potřeba trochu o věci vědět, ale i bez toho se to dá přečíst a minimálně zjistit, že takové věci lze udělat.
rony
29 Březen 2011 - 9:40am
Trvalý odkaz
Re: konverze
no podle mě je ten návod dostačující jediné, kde by mohl někdo narazit, je to naprogramování ATMELa, na to už musí mít člověk programátora (myslím tu destičku co nahraje fw do procesoru). Možná by sem kóža mohl přihodit pár odkazů týkajících se téhle části přestavby
pavel
29 Březen 2011 - 11:07am
Trvalý odkaz
Re: konverze
Bohužel, pořizovat si programátor kvůli tomuhle je kontraproduktivní, protože ten přijde alespoň na 20E. Pro úplnost přidávám odkaz na dva programátory které můžu vřele doporučit.
mySmartUSB MK2
mySmartUSB light
Sice se dá postavit i vlastní programátor, ale to by bylo na delší článek...
pavel
29 Březen 2011 - 11:17am
Trvalý odkaz
Re: konverze
Určitě je lepší něco vědět, ale hlavní je nebát se pájky - ty bys to zvládnul hravě, zvlášť po tom cos předvedl s montáží světel do dNano :-)
Samozřejmně teď zjišťuji co bych tam udělal navíc ... třeba že bych vyvedl ještě jeden pin mikroprocesoru, abych s tím mohl řídit brzdová světla, ale na to už je pozdě ...
Přidat komentář